Czy zadaniu 4 listy 4 ramiona mogą się przecinać? Z jednej strony fizyka nie powinna na to pozwalać, z drugiej na filmach z wykładu chyba się przecinały.
Treść:
Zadanie 4. (4 punkty)
a) Zapoznaj się z problemem kinematyki odwrotnej (Inverse Kinematics Problem).
b) W dalszej części zadania skup się na uproszczonym problemie omówionym na wykładzie, tzn.:
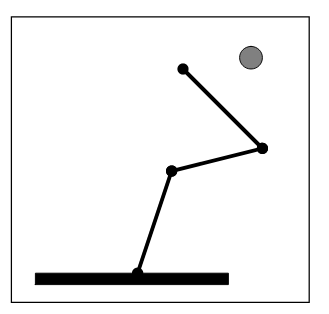
- rozpatrujemy ramię robota, przymocowane do podłoża w punkcie A , złożone z K sztywnych segmentów prostoliniowych S_1, S_2, ..., S_K , o ustalonych długościach l_1, l_2, ..., l_K ,
- ramię może wyginać się w przegubach zmieniając kąt αk pod którym łączą się dwa kolejne segmenty S_k i S_{k-1} (przez S_0 oznaczmy podłoże), k = 1, 2, ..., K ,
- dla każdego kąta αk dany jest przedział [ak, bk] ograniczający zakres jego wartości, k = 1, 2, ..., K,
- dany jest punkt docelowy B,
- zadanie polega na wyznaczeniu wartości kątów α_1, α_2, ..., α_K w taki sposób, aby ramię robota znalazło się jak najbliżej punktu docelowego.
c) Napisz algorytm ewolucyjny rozwiązujący problem kinematyki odwrotnej określony w punkcie b. Stwórz przykładowe zestawy danych wejściowych opisujących problem o różnej wielkości i różnym poziomie trudności. Dokładnie przeanalizuj działanie algorytmu i otrzymane wyniki. Sprawdź różne ustawienia algorytmu.